
D2-1型循跡小車是一款利用光敏電阻接收反射光的強弱來判斷黑線位置,光敏電阻遇到黑線時接收到的反射光變弱,此時它的電阻值會變大,綠色LED不會亮;反之,當光敏電阻遇到非黑線(也就是白色紙面)時接收到的反射光變強,此時它的電阻值會變小,綠色LED就會亮。
車前左右兩側的光敏電阻將訊號轉換成電壓傳給LM393比較器,LM393藉由判斷電壓就可以適時地驅動左右兩側馬達前進,進而達成循線的功能。

電路圖
開始組裝
打開夾鏈袋,把說明書攤開,倒出零件。

先清點一下零件是否齊全,底下圖片是材料表。

清點完畢後先拿出PCB板,對照一下電路圖,花些時間瞭解它的運作原理與佈線配置。

我焊接的習慣是先焊困難的、體積小的、價值高的,在這兒我想先焊電阻。這個套件只有10R、51R、1K和3K3等4種電阻(註1),你可以依照色碼來辨別,也可以用萬用電表量測,如下圖

逐一將電阻插入PCB板,然後用紙膠貼住固定,以避免在焊接時脫落


翻面焊接後用斜口鉗剪除多餘的針腳。在剪除時應注意避免被飛濺的針腳傷到眼睛。

接著要來焊LM393 IC座,一樣將IC座插入PCB板(注意缺口方向),用紙膠固定,然後焊接

繼續焊2個10K可變電阻和自鎖式按鍵開關。
提醒您: ***很重要*** ***很重要*** ***很重要***


經電錶量測後,畫出它們的接腳圖如下

如果是白色開關,請如下插件


如果是藍色開關,請先剪掉其中兩支針腳,再如下插件


接著焊8550電晶體、100uF電容和綠色LED。
(注意LED和電容長腳均為+極,8550電晶體腳位按照PCB板上的圖示插件即可)


鎖上M4方向輪,並焊接光敏電阻和紅色LED。
(注意光敏電阻和紅色LED插件的方向是在PCB背面,並且光敏電阻和紅色LED離地約5~10mm)


將電線分成4段,末端去皮約3~5mm。為使焊接點不易斷裂,建議電線穿過馬達塑膠片再焊接到馬達銅片。

鎖上輪胎,須注意馬達貼紙、輪胎和PCB板之間的關係


撕開背膠,將電池盒黏貼到PCB板。要注意電源線方向,最好靠近PCB板電源接點

將電源線穿過小孔,焊接到電源接點。
(注意紅色電線為+極)

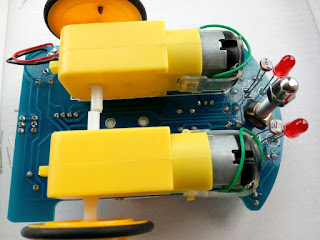
現在可以撕開背膠,將馬達固定到PCB板上。
(黏貼時要注意兩只馬達要保持平行,並且讓輪胎不會干涉到PCB板。)
將電池裝入電池盒,按下開關接通電源,用手抓住馬達電源線碰觸PCB板上的馬達接點(標示'M'處),觀察輪胎轉動的方向。M4方向輪那一端是車頭,如果輪胎轉動的方向不正確,可以試著將電線調換,再次碰觸馬達接點直到輪胎轉動方向正確。最後將電線焊到接點上,並稍微整理一下電線,避免卡到輪胎。

調試
PCB板上有2只10K的可變電阻,它是用來調整光敏電阻的靈敏度,如果您的小車沒有正確地行駛在黑線上,那麼您可以使用螺絲起子調整可變電阻來讓它正確地行駛。
技術資料
D2-1 循線小車教學影片 http://old.56dz.com/video/newd21.mp4
LM393 Datasheet http://html.alldatasheet.com/html-pdf/3068/MOTOROLA/LM393/256/1/LM393.html
8550電晶體 Datasheet http://html.alldatasheet.com/html-pdf/75176/MICRO-ELECTRONICS/8550/1443/1/8550.html
採購資訊
D2-1 循線小車 http://goods.ruten.com.tw/item/show?21630190812799
1.自鎖式按鍵開關在插件前要注意開關的方向。也就是在按下時針腳的短路效果。
2.不同規格的自鎖式按鍵開關其針腳會有不同的連接方式,強烈建議您用電錶的電阻檔位或二極體(聲音)檔位量一下。
3.製造商品管良莠不齊,套件在出貨時可能會隨意拿開關湊數,所以您手上的開關有可能不適用。但沒關係,只要稍微修改即可。
4.底下是兩種不同的開關範例。

(圖片來源:王韋迪 老師)

(圖片來源:王韋迪 老師)
經電錶量測後,畫出它們的接腳圖如下

如果是白色開關,請如下插件

(圖片來源:王韋迪 老師)

如果是藍色開關,請先剪掉其中兩支針腳,再如下插件


(注意LED和電容長腳均為+極,8550電晶體腳位按照PCB板上的圖示插件即可)


鎖上M4方向輪,並焊接光敏電阻和紅色LED。
(注意光敏電阻和紅色LED插件的方向是在PCB背面,並且光敏電阻和紅色LED離地約5~10mm)


將電線分成4段,末端去皮約3~5mm。為使焊接點不易斷裂,建議電線穿過馬達塑膠片再焊接到馬達銅片。

鎖上輪胎,須注意馬達貼紙、輪胎和PCB板之間的關係


撕開背膠,將電池盒黏貼到PCB板。要注意電源線方向,最好靠近PCB板電源接點

將電源線穿過小孔,焊接到電源接點。
(注意紅色電線為+極)

現在可以撕開背膠,將馬達固定到PCB板上。
(黏貼時要注意兩只馬達要保持平行,並且讓輪胎不會干涉到PCB板。)

將電池裝入電池盒,按下開關接通電源,用手抓住馬達電源線碰觸PCB板上的馬達接點(標示'M'處),觀察輪胎轉動的方向。M4方向輪那一端是車頭,如果輪胎轉動的方向不正確,可以試著將電線調換,再次碰觸馬達接點直到輪胎轉動方向正確。最後將電線焊到接點上,並稍微整理一下電線,避免卡到輪胎。

調試
PCB板上有2只10K的可變電阻,它是用來調整光敏電阻的靈敏度,如果您的小車沒有正確地行駛在黑線上,那麼您可以使用螺絲起子調整可變電阻來讓它正確地行駛。
註1:電阻值可能會稍微不同,這不會影響到整體運作。
後記
1.沒想到我一打開電源它就正確地循線而行,沒有調整到可變電阻,可說是超級好組裝。另外,它行駛的速度還蠻快的,循線能力也不錯,如果 Arduino 程式寫得不好,說不定 Arduino 小車還會輸給 D2-1 呢。
2.看來可以叫兒子用黑色電工膠帶去貼一些各種形狀的線來測試一下。
後記
1.沒想到我一打開電源它就正確地循線而行,沒有調整到可變電阻,可說是超級好組裝。另外,它行駛的速度還蠻快的,循線能力也不錯,如果 Arduino 程式寫得不好,說不定 Arduino 小車還會輸給 D2-1 呢。
2.看來可以叫兒子用黑色電工膠帶去貼一些各種形狀的線來測試一下。
技術資料
D2-1 循線小車教學影片 http://old.56dz.com/video/newd21.mp4
LM393 Datasheet http://html.alldatasheet.com/html-pdf/3068/MOTOROLA/LM393/256/1/LM393.html
8550電晶體 Datasheet http://html.alldatasheet.com/html-pdf/75176/MICRO-ELECTRONICS/8550/1443/1/8550.html
採購資訊
D2-1 循線小車 http://goods.ruten.com.tw/item/show?21630190812799
沒有留言:
張貼留言