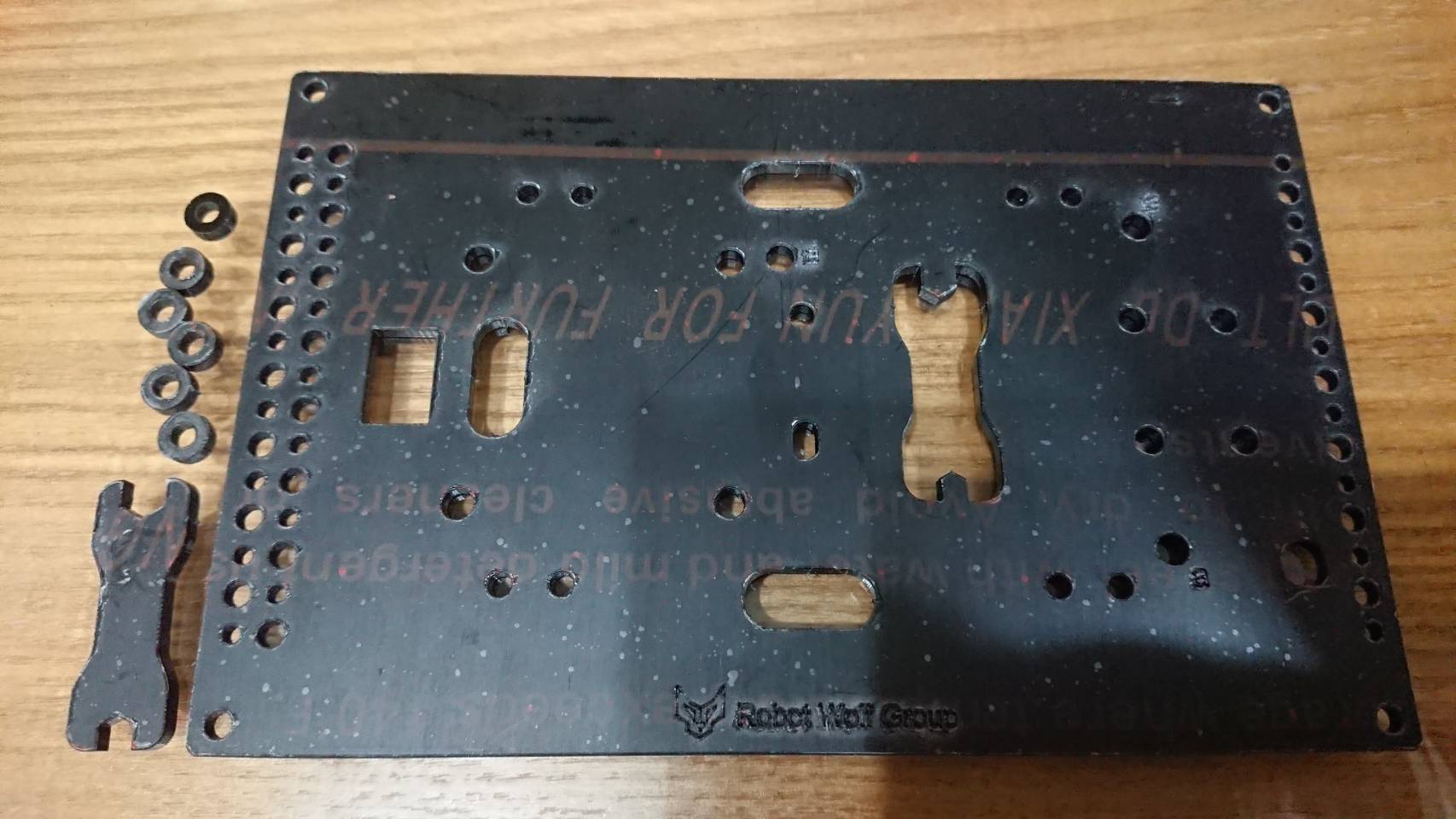
這款履帶車是「給氣狼機器人聯盟」設計的,車體底盤採用 3mm 黑色壓克力,外觀質感佳。
本車底盤採多功能目標設計,下層板可固定 4 只 TT 減速馬達,不只可作為履帶車的動力來源,它也可以變更為 4 輪傳動車,也就是 4 個輪子各自有獨立的動力。
下層板可安裝 18650 鋰電池雙節電池盒、L9110S 馬達驅動模組、Arduino Nano 開發板和擴展板,並且預留了 2.4G 天線固定孔和船型開關固定孔,所以只要這個下層板就滿足了組裝一台完整履帶車的所有條件。
如果您還有其它感測模組需要安裝,也可以使用尼龍柱架設起上層板,如此可利用的空間大大增加不少。上層板也預留了 SG90 伺服馬達的孔位,配合超音波感測器可以讓您做出180度方位的測距。


準備工具
M3 螺絲起子
電工膠帶
烙鐵和焊錫
組裝步驟
Step1 取出壓克力底板,將扳手和墊片取下備用。
Step2 使用 2 只 M3*8 螺絲、螺帽,將電池盒鎖到下層底板。
這是正面視角


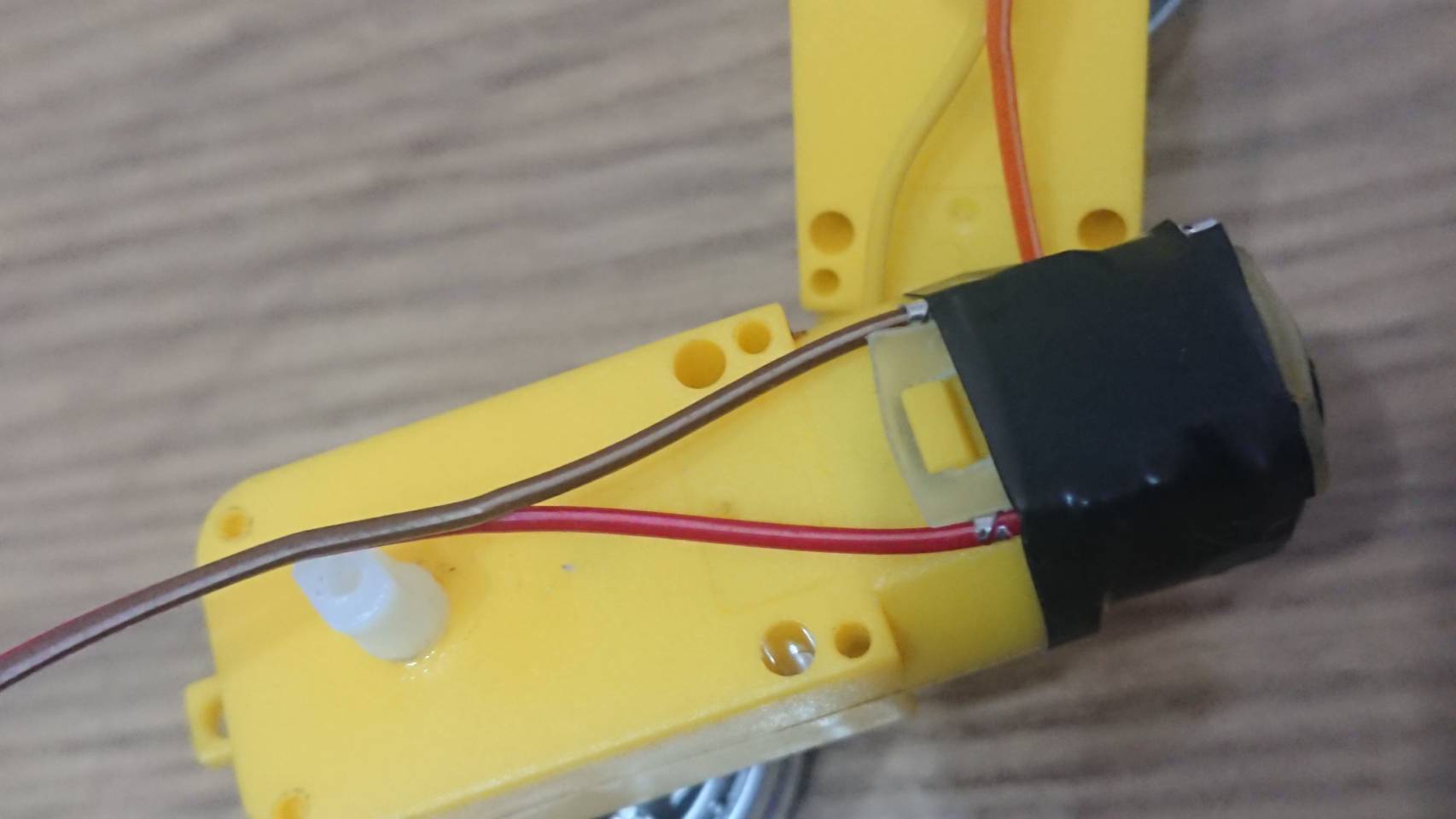
Step3 將 2 只 TT 馬達焊上電源線。建議用電工膠帶纏住焊接處,以保護銅片不會因拉扯而損壞。
Step4 取出下列材料,用長螺絲鎖到 TT 馬達。

下圖是完成後的情況

Step5 上面步驟總共需完成 4 組,如下圖。

Step6 取出馬達支架,將它們鎖到 TT馬達。

(須注意長螺絲和方形鋁架的方向)

Step7 使用 4 只 M3 圓頭螺絲先將 2 組承重輪總成(詳底板右側)跟底板鎖緊。
為了方便安裝上履帶,需先用 M3 圓頭螺絲將 2 組驅動輪總成(詳底板左側)跟底板稍微固定,也就是不要鎖緊。如下圖

然後將履帶安裝到 2 只輪子上,再用 M3 圓頭螺絲將它鎖緊到底板。
提醒您:在鎖這顆螺絲時需稍微扳動馬達齒輪箱,使齒輪箱邊緣對齊底板邊緣。
完成後如下圖


這是另一個視角

這是底部視角

Step8 將船型開關固定到底板。履帶車底盤至此組裝完成。


Step9 您可以使用 M3*10 螺絲將 L9110S 馬達驅動模組固定到底板。馬達電源線可以穿過底板兩側的孔洞固定到 L9110S 馬達驅動模組。

Step10 您可以使用 M3*8 螺絲和 M3*15 尼龍柱將 Arduino Nano 開發板和擴展板固定到底板。

Step11 使用 M3*8 螺絲和 M3 尼龍柱架設上層板。

Step12 將 2.4G 天線鎖到上層板。

Step13 使用 M2*8 螺絲和螺帽將 SG90 伺服馬達鎖到上層板。

伺服馬達上面可以安裝超音波測距模組

當然也可以安裝 ESP32-CAM 開發板,成為一台視訊遙控履帶車。
採購資訊
沒有留言:
張貼留言