1. 因為機構件已改版,上面圖片僅供參考,壓克力零組件以實體為主。
2. 強烈建議您先把壓克力表面的保護紙撕除後再繼續以下之組裝步驟。
機電零件
Arduino nano 開發板 * 1
Arduino UNO nano 兩用擴展板 * 1
您也可以使用 UNO 及其擴展板
SG90 伺服馬達 * 4
(建議使用 MG90S * 1 + SG90 * 3)
杜邦線 公母頭 * 3
二、開始組裝
組裝前注意事項:
1.本套件所有螺絲孔都是 M3 孔,但孔有2種,一種是鬆孔,另一種是緊孔(自攻孔)。鬆孔在螺絲穿過後機構件仍可以鬆動;緊孔在螺絲穿過後機構件無法鬆動,在穿螺絲時請注意方向。
因為機器在加工時會有誤差,如果在鎖緊孔時發現太鬆,請在緊孔內塗抹樹脂再鎖螺絲,或是在鎖好螺絲後用快乾膠點黏緊孔處。
2.為了我們在組裝時方便識別起見,需要先定義一下機械手臂各部位名稱。把手臂放在胸前,夾子跟眼睛的方向一樣朝前放置,機身左側的馬達稱為左馬達,右側馬達稱為右馬達,底部的馬達稱為底座馬達,而夾子處的馬達理所當然稱為夾子馬達。
3.***最重要是這件事*** 在將機構件固定到馬達時,建議夾子馬達、右馬達和底座馬達需上電並固定在 90 度;左側馬達,需上電並固定在 170 度(註A),而後再鎖緊螺絲。
註A:
有些 SG90 伺服馬達無法轉到 180 度,如果程式持續要求它要 180 度,馬達有可能會燒毀。建議在組裝前先了解一下伺服馬達的可轉動範圍,而此處的 170 度只是一個保守的安全角度,並非絕對。
指定馬達轉動到特定角度程式詳
http://pizgchen.blogspot.tw/2016/09/mearmrover.html
Step1 這個步驟我們要來組裝夾子。
準備下列機構件
使用 2 只 M3x8 螺絲鎖住夾子。
提醒您:此處不可鎖緊,應讓夾子能自由轉動。
這是背面
使用 4 只 M3x10 螺絲將下列機構件鎖住。
提醒您:靠進夾子那 2 支螺絲不可鎖過頭,應讓夾子能自由轉動。
這是側面
這是另一面
使用 1 只 M3x8 螺絲將下列機構件鎖住。
提醒您:此處不可鎖緊,應讓它能自由轉動。
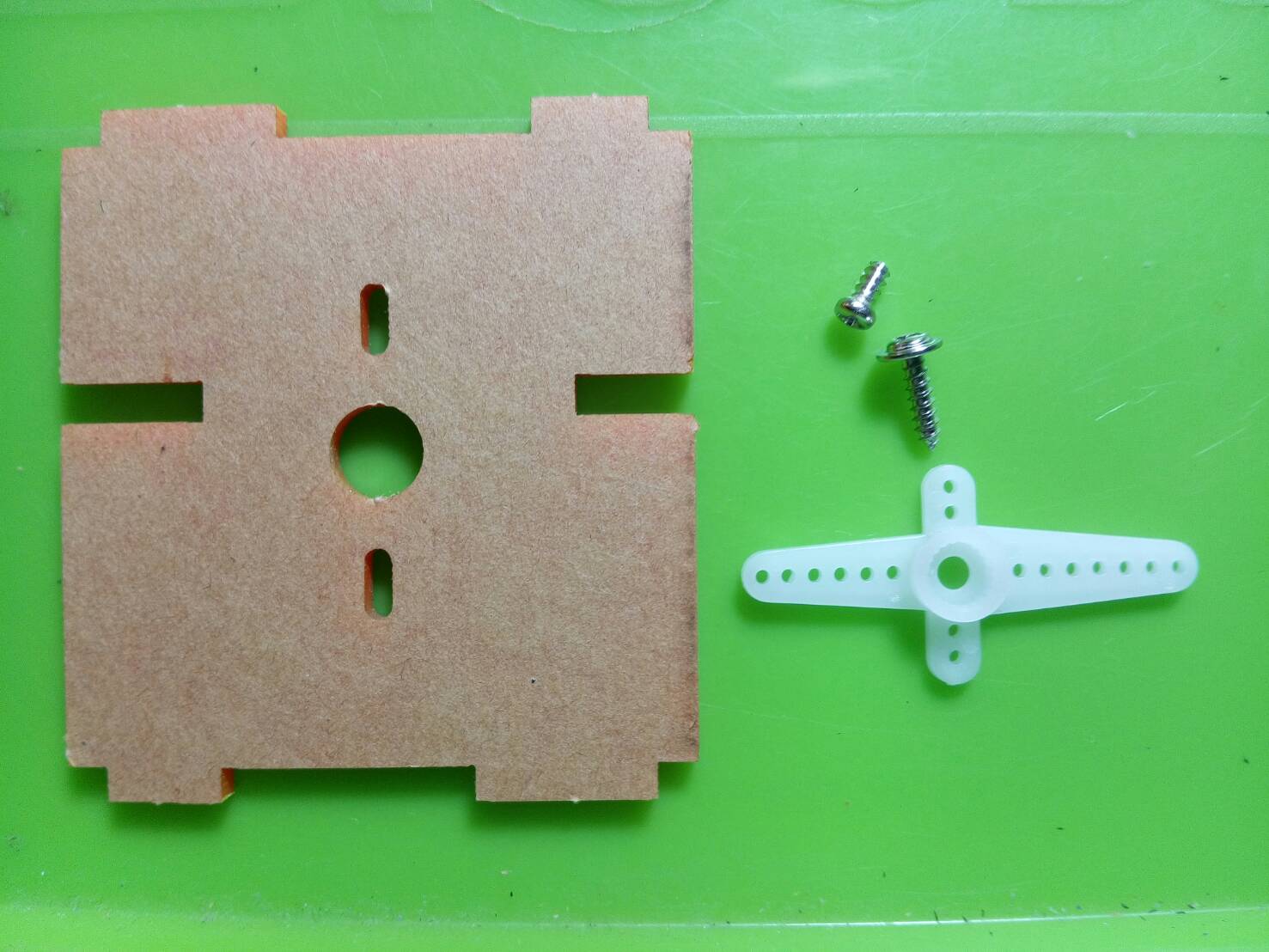
取出下列機構件
提醒您:下方這個機構件有 2 片,此處應取用較短那片。
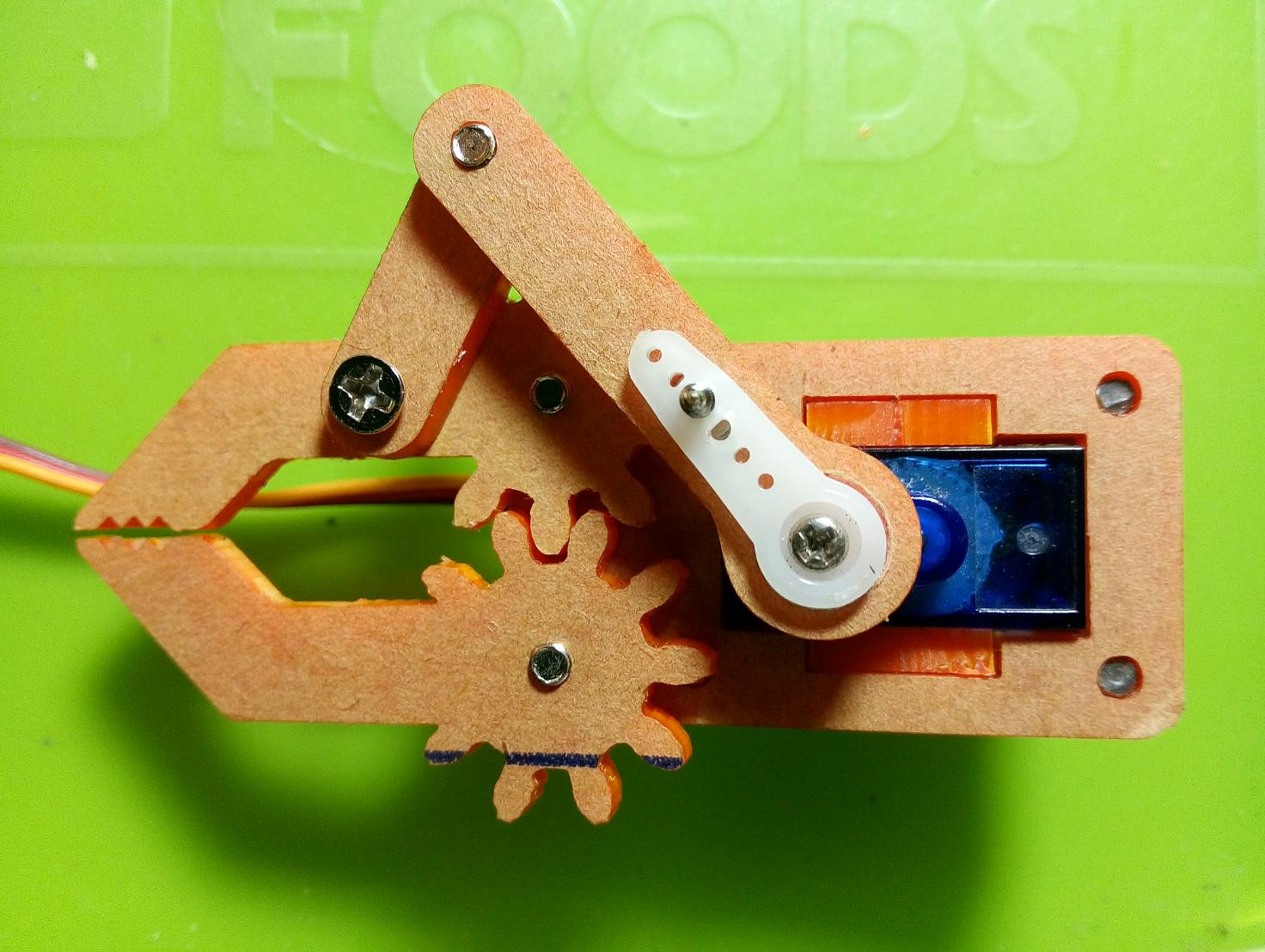
將伺服馬達搖臂塑膠片置入大孔內
在另一面用伺服馬達所附的自攻螺絲固定
使用下列程式將伺服馬達轉動到90度位置
#include <Servo.h>
Servo myservo; // create servo object to control a servo
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
myservo.write(90);
}
void loop() {
}
在伺服馬達上電的情況下,將之前組件套入伺服馬達,並用伺服馬達所附之小螺絲將它鎖緊。
然後再使用 1 只 M3x8 螺絲將機構件另一端鎖住。
提醒您:此處不可鎖緊,應讓它能自由轉動。
這是完成的樣貌
Step2 為夾子裝上 3 根桿件,如下圖。
準備下列機構件
取出下列機構件
使用 M3x10 螺絲將桿子鎖上。
提醒您:此處不能鎖太緊,要讓它能夠靈活轉動。
取出下列機構件
使用 M3x10 螺絲將較細那端鎖到夾子的側孔。
提醒您:此處不能鎖太緊,要讓它能夠靈活轉動。
取出下列機構件
使用 M3x10 螺絲將桿件鎖到夾子的側孔。
提醒您:此處不能鎖太緊,要讓它能夠靈活轉動。
這是完成的樣貌
Step3 組裝右側板,如下圖。
使用 M2 螺絲和螺帽將伺服馬達鎖緊。
提醒您:此處請務必鎖緊。
這是背面
準備下列機構件
使用 M3x8 螺絲將桿件鎖到右側板。
提醒您:此處不能鎖太緊,要讓它能夠靈活轉動。
使用 M3x10 螺絲將桿件和墊片鎖到三角片(墊片被夾在桿件和三角片之間)。
提醒您:
1. 注意三角片之正確孔位。
2. 此處不能鎖太緊,要讓它能夠靈活轉動。
這是背面
Step4 組裝左側板,如下圖。
使用 M2 螺絲和螺帽將伺服馬達鎖緊。
提醒您:此處請務必鎖緊。
這是背面
準備下列機構件
取出下列機構件
將伺服馬達搖臂塑膠片置入大孔內
在另一面用伺服馬達所附的自攻螺絲固定
使用下列程式將伺服馬達轉動到170度位置
#include <Servo.h>
Servo myservo; // create servo object to control a servo
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
myservo.write(170);
}
void loop() {
}
在伺服馬達上電的情況下,將之前組件套入伺服馬達,並用伺服馬達所附之小螺絲將它鎖緊。
然後再使用 1 只 M3x8 螺絲將機構件另一端鎖住。
提醒您:此處不可鎖緊,應讓它能自由轉動。
Step5 組合 H 形組件,如下圖。
準備下列機構件
將伺服馬達搖臂塑膠片置入大孔內,並在背面用伺服馬達所附的自攻螺絲固定
這是背面
使用下列程式將伺服馬達轉動到90度位置
#include <Servo.h>
Servo myservo; // create servo object to control a servo
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
myservo.write(90);
}
void loop() {
}
在伺服馬達上電的情況下,將之前組件套入伺服馬達,並用伺服馬達所附之小螺絲將它鎖緊。
使用 1 只 M3x12 螺絲和螺帽將機構件鎖住。
使用 1 只 M3x12 螺絲和螺帽將機構件鎖住。
Step6 組裝基座,如下圖。
提醒您:此步驟之伺服馬達固定方式,請依您手上的機構件型式去固定。
準備下列機構件
將伺服馬達底部穿過機構件,杜邦線由背面穿出
使用 4 只 M3x12 螺絲和螺帽將伺服馬達鎖緊。
使用 4 只尼龍柱和螺帽將機構件鎖緊。
準備下列機構件和材料
使用伺服馬達所附之 2 只大螺絲將它鎖緊。
提醒您:此處壓克力板上的小箭頭是朝上的。
這是背面
準備下列組件
使用下列程式將伺服馬達轉動到90度位置
#include <Servo.h>
Servo myservo; // create servo object to control a servo
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
myservo.write(90);
}
void loop() {
}
在伺服馬達上電的情況下,將之前組件套入伺服馬達,並用伺服馬達所附之小螺絲將它鎖緊。
提醒您:此處壓克力板上的小箭頭是朝左的。
Step7
組合右側板與基座。
準備下列機構件
將它組合成工字形
這是它的右視圖
提醒您:山形板除外的那兩片壓克力板的孔洞不是在板子中間。
這是它的左視圖
將山形組件插入右側板
使用 1 只 M3x12 螺絲和螺帽將它鎖緊。
翻到另一側,使用 1 只 M3x12 螺絲和螺帽將它鎖緊。
將上面部件安裝到基板上
Step8
組合左側板與基座。
將左側板蓋上
使用 1 只 M3x12 螺絲和螺帽將它鎖緊。
翻到另一側,使用 1 只 M3x12 螺絲和螺帽將它鎖緊。
Step9
組合夾子與 H 形部件。
使用 1 只 M3x8 螺絲將它鎖住。
提醒您:此處不可鎖緊,應讓它能自由轉動。
使用 1 只 M3x8 螺絲將另一支桿件鎖上。
提醒您:此處不可鎖緊,應讓它能自由轉動。
使用 1 只 M3x12 螺絲依序將三角片、爪子桿件和 H 形部件鎖住。
提醒您:此處不可鎖緊,應讓它能自由轉動。
翻轉到背面,使用 1 只 M3x8 螺絲將另一支桿件鎖上。
提醒您:此處不可鎖緊,應讓它能自由轉動。
Step9 將整
組夾子固定到底板。
使用 4 只 M3x8 螺絲將尼龍柱固定到底板。
這是背面
Step10
組裝控制板。
準備 Arduino Nano 開發板和擴展板
將 Nano 插入擴展板
使用 4 只 M3x12 螺絲和螺帽將 Arduino 控制板固定到底板。
將夾子的伺服馬達杜邦線穿過 H 形部件的圓孔,
並將 3P 公母頭杜邦線的公頭與夾子的伺服馬達杜邦線母頭接在一起,作為延長使用。
Step11 將 Arduino 控制板固定到底板(為了清楚展示,我先暫時移除機械手臂部件)。
Step11 電路接線
。
伺服馬達與 Nano 擴展板的接線如下:
擴展板 伺服馬達
5V VCC
GND GND
D2 底板馬達橘色線
D3 右側馬達橘色線
D4 左側馬達橘色線
D5 夾子馬達橘色線
Step12 上傳程式
。
//2016-09-21 by PizG Chen
#include <Servo.h>
Servo s1,s2,s3,s4;
int b1,b2;
int v0,v1,v2,v3;
int a,a1,a2,a3,a4;
void setup() {
Serial.begin(9600);
s1.attach(2); //
底板馬達
s2.attach(3); // 右馬達
s3.attach(4); //左馬達
s4.attach(5); // 夾子
pinMode(6, INPUT_PULLUP);
pinMode(7, INPUT_PULLUP);
a=2;
a1=90;
a2=90;
a3=170;
a4=90;
}
void loop() {
// get data
b1 = digitalRead(6);
v0 = analogRead(A0);
v1 = analogRead(A1);
b2 = digitalRead(7);
v2 = analogRead(A2);
v3 = analogRead(A3);
// print data
// turn data
if (v3 < 340) a1 = a1 + a;
if (v3 > 680) a1 = a1 - a;
s1.write(a1);
if (v2 < 340) a2 = a2 - a;
if (v2 > 680) a2 = a2 + a;
s2.write(a2);
if (v1 < 340) a3 = a3 - a;
if (v1 > 680) a3 = a3 + a;
s3.write(a3);
if (v0 < 340) a4 = a4 - a;
if (v0 > 680) a4 = a4 + a;
s4.write(a4);
delay(100);
}
========================================================================
使用搖桿控制機械手臂
提醒您:由於機構件有小部分改版,層板外觀可能稍微不同,此步驟請依您手上的機構件型式去固定。
Step1 組裝搖桿。
準備下列層板機構件
以下為不同版次的層板,可先取下所有墊圈備用。
將 8 只小墊圈置於搖桿孔位上。
用 8 只 M3x12 螺絲和螺帽將搖桿固定到層板。
使用 4 只 螺帽將 M3x30+6 尼龍柱固定到層板。
使用 4 只 M3x8 螺絲將尼龍柱固定到底板。
Step2 電路接線
。
搖桿與 Nano 擴展板的接線如下:
擴展板 左搖桿
GND GND
5V VCC
A0 VRX
A1 VRY
D6 SW
擴展板 右搖桿
GND GND
5V VCC
A2 VRX
A3 VRY
D7 SW
Step3 上傳程式
。
//2016-09-21 by PizG Chen
#include <Servo.h>
Servo s1,s2,s3,s4;
int b1,b2;
int v0,v1,v2,v3;
int a,a1,a2,a3,a4;
void setup() {
Serial.begin(9600);
s1.attach(2); // 基座馬達
s2.attach(3); // 右馬達
s3.attach(4); //左馬達
s4.attach(5); // 夾子
pinMode(6, INPUT_PULLUP);
pinMode(7, INPUT_PULLUP);
a=2;
a1=90;
a2=90;
a3=170;
a4=90;
}
void loop() {
// get data
b1 = digitalRead(6);
v0 = analogRead(A0);
v1 = analogRead(A1);