這個麥克納姆輪小車底盤長25.5cm 寬15cm。底盤採用鋁合金材質,堅固耐用。
麥克納姆輪採用注塑工藝製造,並非 3D 列印,質量可靠。麥輪直徑約 60mm,適用於市售制式小車底盤。


小車底盤套件 1件
馬達電源線(長約20CM) 8條

組裝步驟
Step1 先把 4 只馬達都焊上電源線。
提醒您:最好電源線的正負(紅黑線)位置都和相片中的一樣。

Step2 拿出鋁質底盤和螺絲,將馬達鎖上。
提醒您:
1. 鋁質底盤的塑膠護膜,只要不妨礙輪子轉動即可不必撕除。
2. 馬達有焊電線那一側靠車體內部。
3. 螺絲請務必鎖緊。

Step3 其它 3 個馬達也如 Step2 方式鎖上。

Step4 由於輪框並非確實固定在輪子上,小車行走時有可能會脫落,因此建議將輪框塗抹膠水黏上輪子,或是用 M2.3*12~20mm 螺絲從外側穿過輪框、輪子、聯軸器鎖緊到TT馬達。

Step5 至此大功告成。
提醒您:請注意 4 個輪子胎紋的位置,必須確實正確。

這是正面


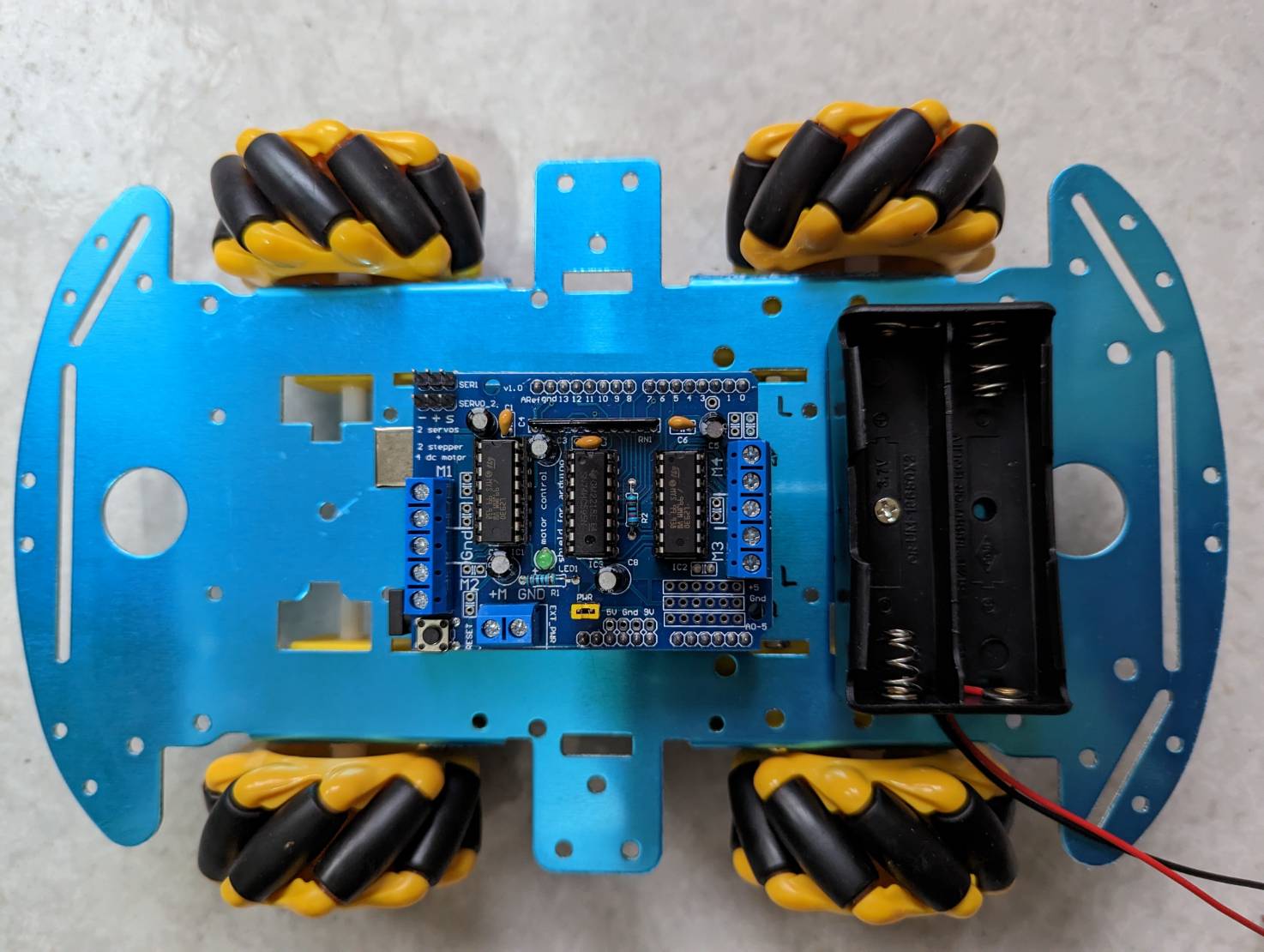
Step6 如果有 Arduino Uno 開發板,可以使用 M3*12 螺絲、螺帽固定。18650 雙節鋰電池盒,則可以使用 M3*6 螺絲、螺帽固定,如下圖。
提醒您:
1. 因金屬板具有導電性,因此最好在Arduino Uno 開發板和金屬底板之間放置墊片。
2. 圖片中標註"a"字樣者為 Arduino Uno 開發板固定處。


Step7 將 L293D 馬達驅動板插到 Uno 開發板上面。
Step8 至於手機藍牙遙控這部分,請參考「手機藍芽遙控麥克納姆輪車」。
相關鏈結









